Sunday January 26th
Nostalgia: Old Robot idea
- I found these while uploading a video for a proposal today. Part of why I chose to go into research was because I would hang out every month with a bunch of NASA scientists; we would go drinking together. They had all done PhDs, and something about their values and commitment to selfless research was very appealing to me. So that’s where this started for me.
- I went to a Linux event at a regular Meetup (one of the runners of the group did later on go on to work for JPL), and there always seemed to be a pretty large gathering of NASA scientists at this event. JPL-ers are a pretty fun bunch with a distinct sense of humour; one of them once made a virtual planetarium for us, another let us look through some telescopes at JPL, and yet another was doing work with a 3D lidar scanner connected to a cat food can in his spare time. The whole maker/hacker scene there excited me. There was a sort of playfulness about scientific discovery that was also very creative. Cross-disciplinary training was encouraged. The first Linux Meetup I attended was by a scientist who worked on NASA’s OnSight, which is their planetary geology VR device with a hololens. He still joked that “of course you of all people would like a language like Haskell”. YES.
- But I made friends with a scientist/mathematician there, and we never really went back to that event; instead, we hung out every Thursday, and he encouraged me to go to grad school. He’s still a strong mentor and advocate for me today. So I guess I’m this weird film-school electronics/camera technician concept design computer scientist girl now.
I consider myself a maker
- It’s weird when people tell me today that I can’t do robot things or don’t understand computer vision stuff because I work in programming languages research, because between 2008 and 2017-ish, all I did was robot-related tech stuff, camera stuff, hardware and soldering (I worked as an electronics and high speed camera technician for a good 8 years), and somewhere between 2014 to 2017, I was also painting and drawing and learning 3D modelling. I always thought that to be able to express an idea, it would benefit a person to learn those tools. But anyways, I spent some time learning some creative tech stuff, either through exoskeleton stuff, 3D modelling, mentoring students, being part of hobby robotics groups such as SV-ROS, etc. In California, there is a lot of that, and people are intellectually curious in general, so you get a lot of people who pick up a machine shop class just to gain the skills for a thing they’re trying to build. I miss that freedom these days; academia can be so narrow-minded in that respect, and so rigid. I struggled a lot with this in Undergrad, and expect to continue to struggle a lot with this in grad school, because I often draw from different things. I used to be a part of a hackerspace in downtown LA that would do everything from large-scale 3D printing, machining, welding, woodworking, and architectural robotics used on parametric modelling node-based programming. Oh yeah, and sometimes there would be charcoal drawing in there, too, and I would attend 72 hour long drawing events, where people would stay up for 72 hours and live on nothing but coffee and the models would come in and pose and we would draw them and listen to music, which was often a dj live-coding!
My first software onsite
- My first software onsite was for a robotics company, and my challenges were in C and C++. I believe that my school curriculum at the time, my interests in robotics in general, and my love of hackerspaces were the result of that, even though I was pretty green at the time. Also, the technical side of the film industry (which is where I started) has an extensive number of robotics and robotics-related technologies (think cameras, camera cranes, cameras on all sorts of wires that move and do the same things repeatedly for each shot, or motorized vehicles with cameras on them). One of the companies I worked for had quite a few patents in robotics technology, and our sister company worked on exoskeletons. So yeah; I know a thing or two about robots, and I very much consider myself more of a systems-thinker (that is, “software” for me is mentally both composed of hardware and software, which is rare in today’s CS schools).
Somehow that ended up in a Space thing
-
I segued from architectural parametric modelling node-based programming (circa 2014-2016) into committing to learning about robots fully around 2016. I attended a school in which my professors were actually working on the Mars 2020 rover. It was a pretty wild experience, to be honest. I also made friends with a guy who programmed robots in a dialect of Lisp, but I’ve lost touch with him.
-
Many years ago, I had the opportunity to do a workshop at JPL. However, to get there, we had to write a proposal and make several designs for possible Mars robots that might work for the 2020 mission.
At the time
- I was in love with the 3D modelling programme Rhino (which is used moreso by architects and product designers; a guy who introduced me many years ago to the technology now works for FAANG), at the time, so I used it to do quick mock-ups and designs for these, and thought of drones that might fit in a quadrant design with rotors and drills and that would recharge on the larger rover. In retrospect, maybe it was pretty silly to expect the smaller drone to also have a drill, because that would use a lot of power, and the weight of the drone would be a consideration, but it’s still a fun project to go back and look at, and I did end up at the workshop, after all, scoring a perfect score on my project.
Here is an article on us at JPL
- Courtesy of NASA
- I found this while looking up my mentor for our team, O Polanco, who was (at the time) working as a mechanical engineer for JPL. This was my first time at JPL.
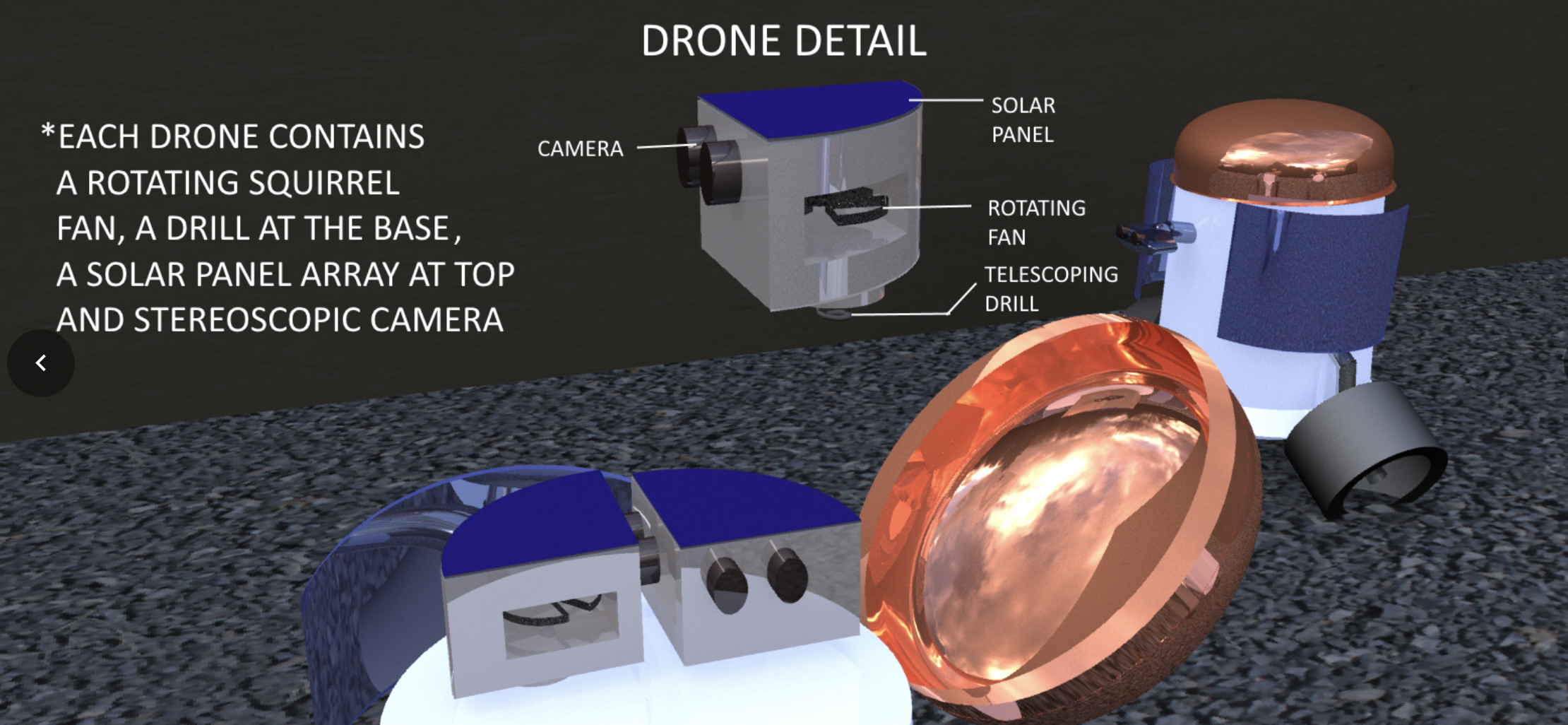
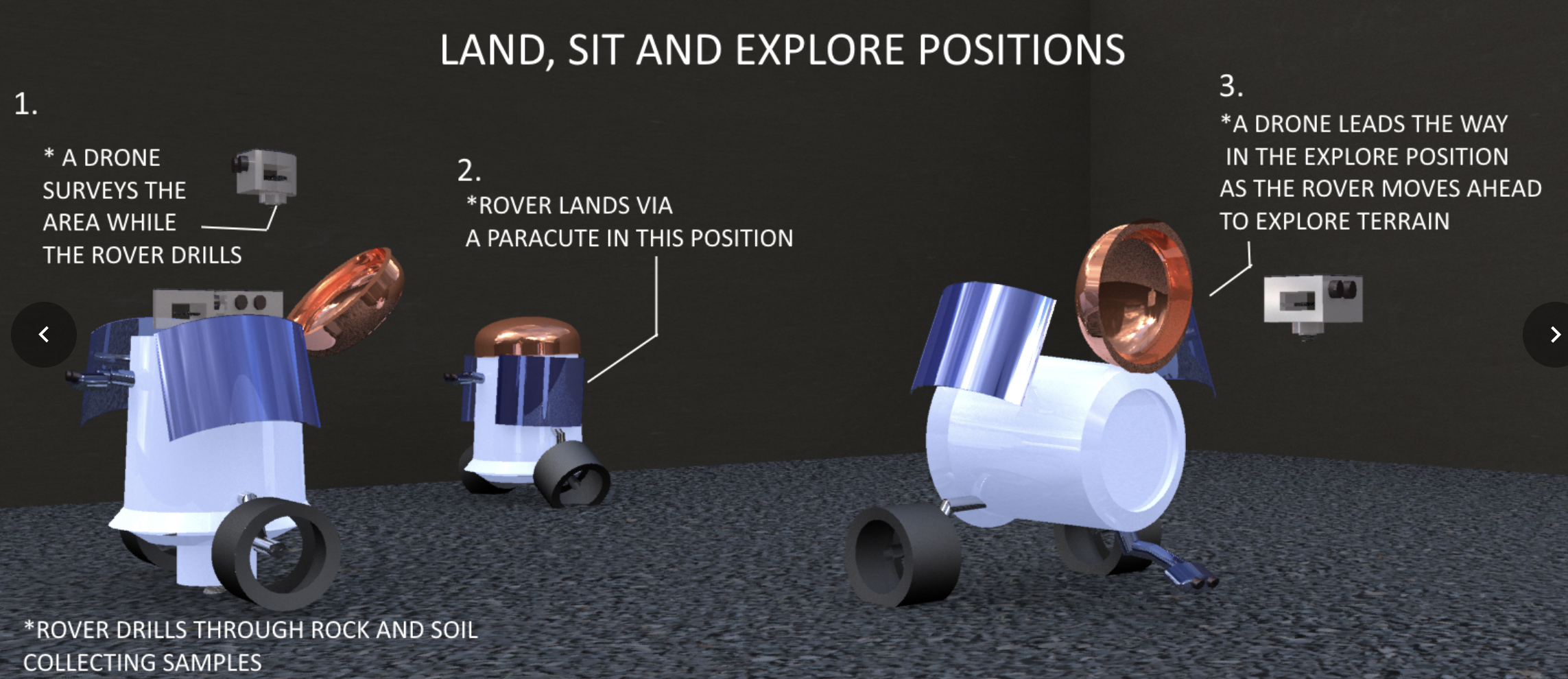
Here are some of the models I found from my proposal.
- These are from 2016. The details about squirrel fans are there because I worked with them day to day, both 12v and 24v ones. Also, stereoscopic cameras, from one of the jobs I had, where we had both beamsplitter cameras and side by side stereoscopic cameras that would have to be calibrated via lens collimation. I’m doing a PhD right now in Computer Science, but I also think in the future a lot of these random skills might prove to be worthwhile that I’ve accrued over the years…somehow. I know a lot about how light works, how images work, how cameras work, and a bit of electronics (in one class, a professor once tried to convince me to get electronics certification, but I was already hooked on CS by then).
This is the original wireframe CAD drawing
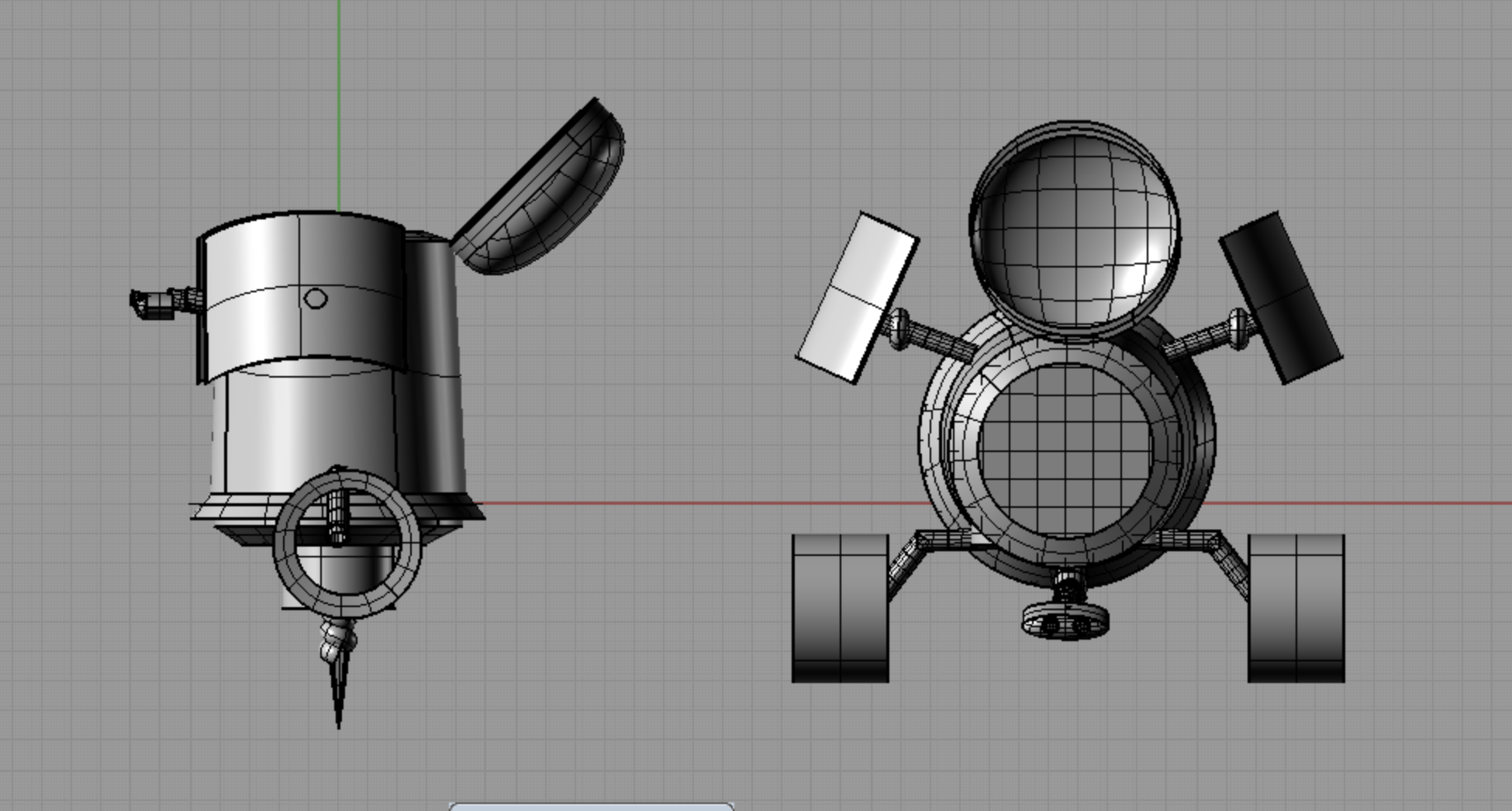
Top Plan and Side Elevation Views
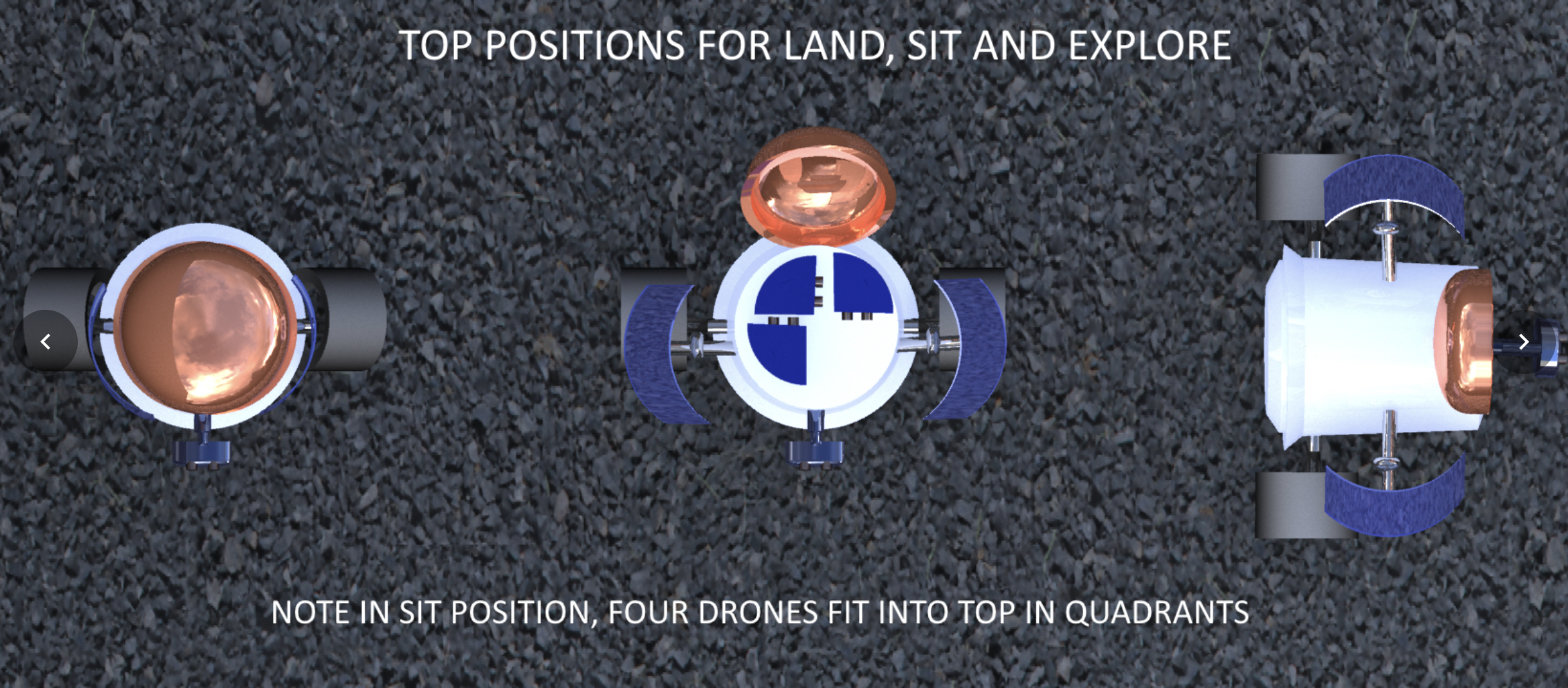
Different Views
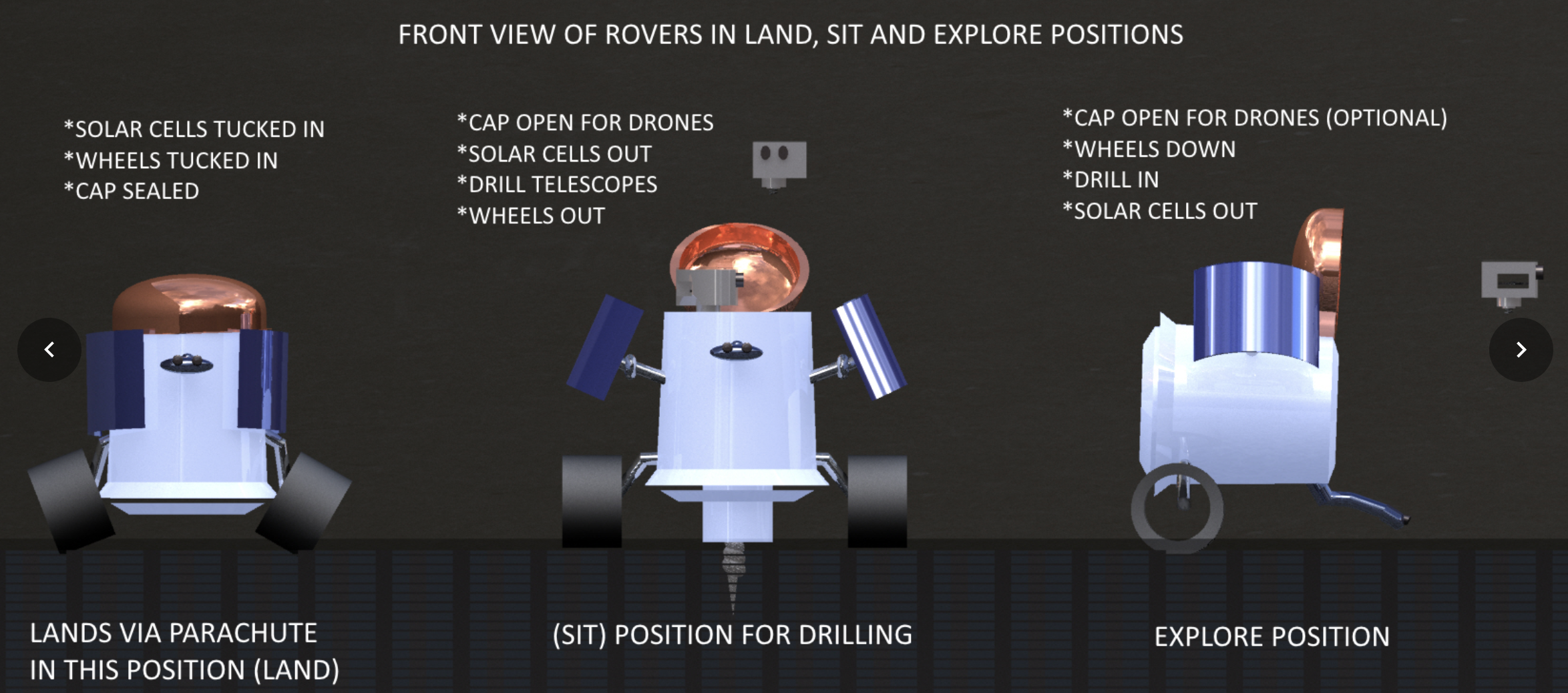
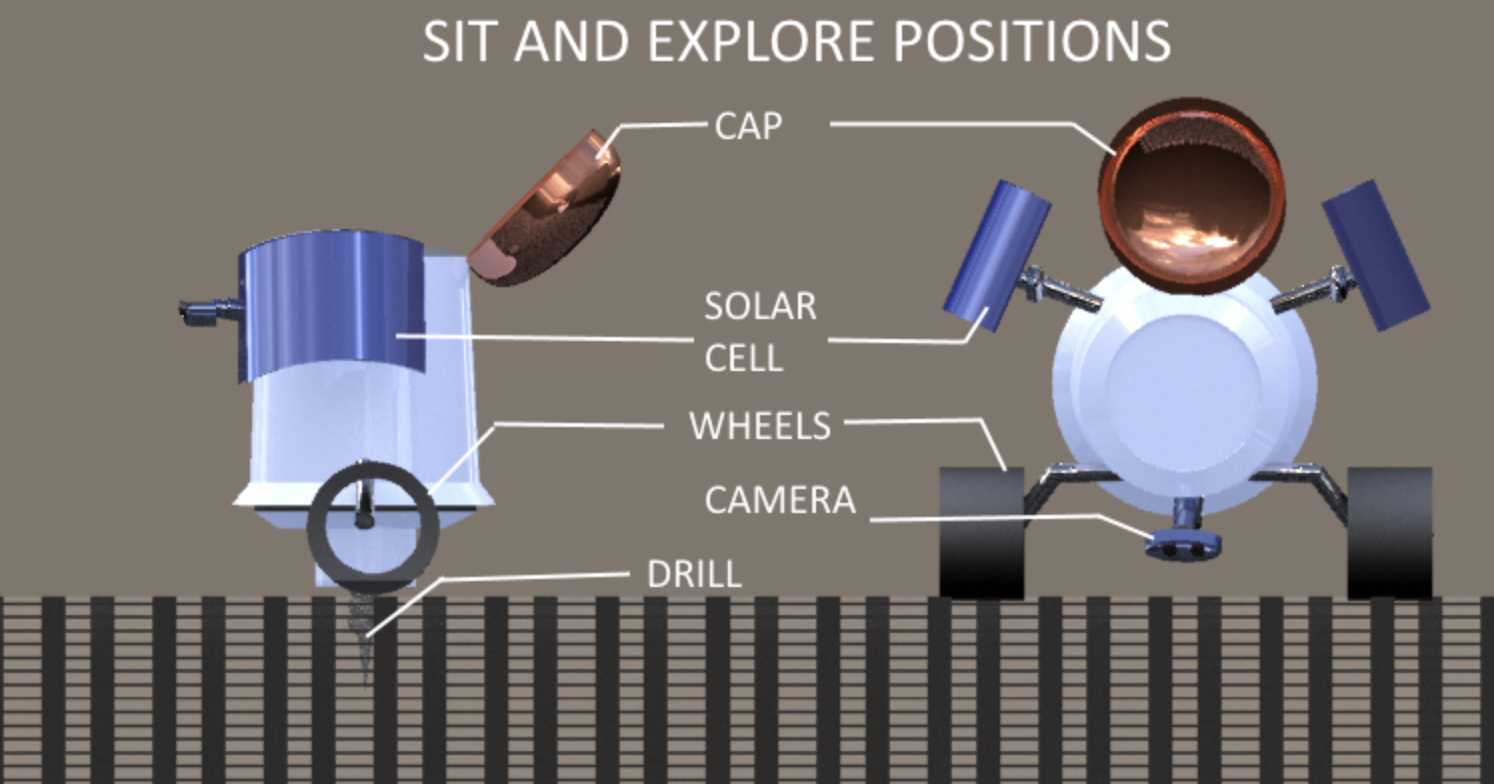
This is rendered in an environment

Anyways, this is just a post
- It means nothing, and there are just photos I found from back then. It’s really cool to see how everything has evolved. I don’t know exactly how I ended up here, and when people say “how did you get into computer science”, it takes a minute. To me, it’s all the same thing; wanting to be a maker and specifically, to do things that will make a difference; an optimism and desire to do good, and to be a creative. And that is why I’m excited and optimistic about the future.
And that’s it
Written on January 26, 2020